Modul 4: Percobaan
Sistem Monitoring Greenhouse Otomatis Untuk Tanaman Sayuran
1. Prosedur [Kembali]
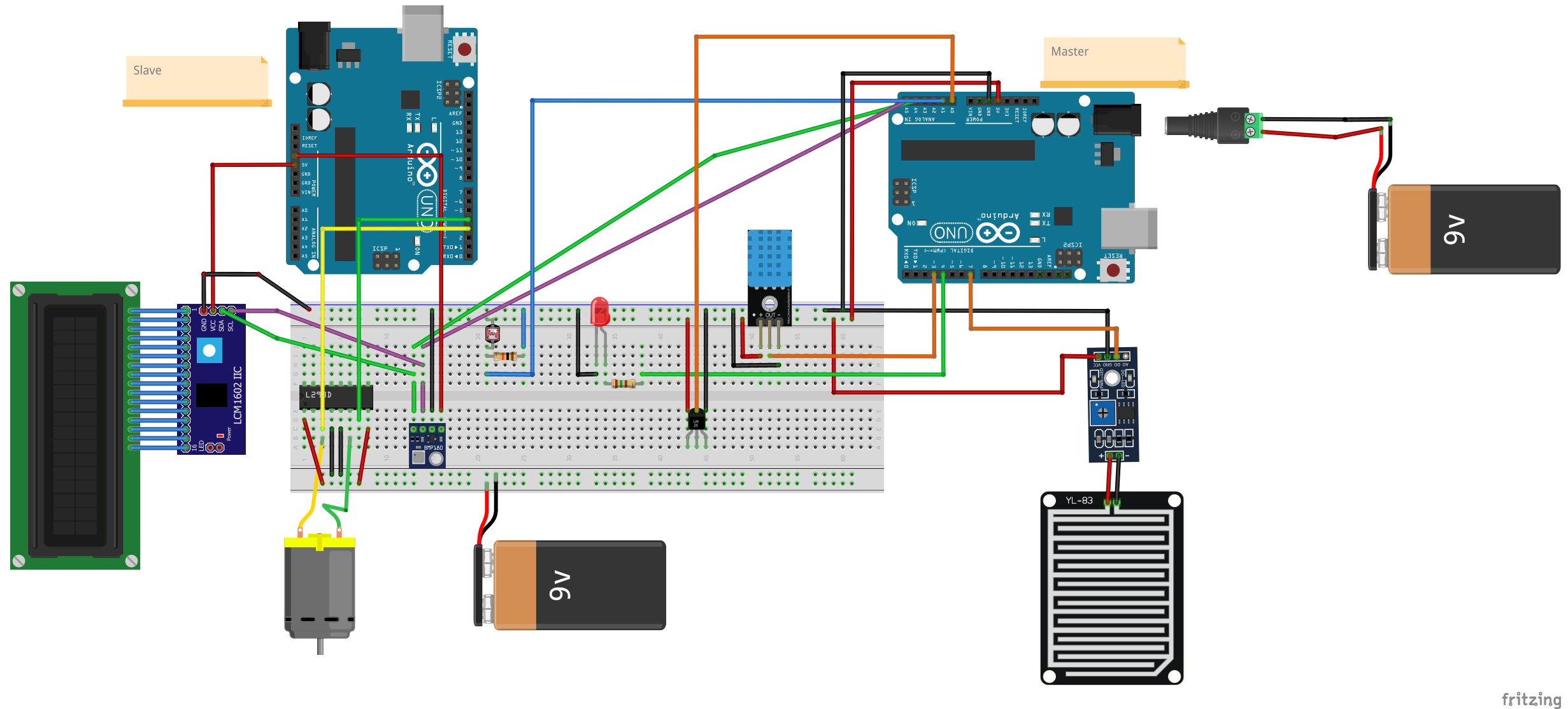
- Siapkan alat dan bahan yaitu dengan komponen utama dan komponen lainnya seperti Arduino UNO, LCD, LED, Sensor hujan, Sensor DHT11, Sensor LM35, Sensor BMP180, Motor DC, Resistor, L293D Driver
- Rangkai sesuai gambar percobaan
- Rancang kerja rangkaian sesuai flowchart
- Tekan tombol “Play” untuk menjalankan simulasi
- Arduino

- LCD 16x2
- LED

- Resistor
- Sensor LDR

- Sensor Rain
- Sensor DHT11
- L293D Driver

- Motor DC
- Sensor BMP180
- Sensor LM35
3. Rangkaian Simulasi dan Prinsip Kerja [Kembali]


Kondisi (logika):
Rain Sensor = jika tidak hujan rumah kaca membuka (motor bergerak)
LDR = Cahaya kurang, lampu hidup sebagai pencahayaan buatan (indikatornya menggunakan LED)
Sensor LM35 = Jika suhu tinggi, akan mengaktifkan motor sebagai kipas untuk pendingin greenhouse
DHT11 = jika kelembaban tinggi, membuka ventilasi untuk mengurangi kelembaban (motor DC bergerak)
Sensor BMP180, bertindak sebagai prediksi cuaca dan kondisi lingkungan, pengawasan ventilasi. Jika nanti kondisi memang tidak normal, maka rumah kaca ini akan memproteksi dirinya dengan cara menutup secara keseluruhan, dan menggunakan alternatif lainnya yang tersedia di dalam sistem rumah kaca, seperti misalnya kurangnya cahaya, maka LED akan hidup sebagai indikator pencahayaan.
1. Prediksi Cuaca dan Kondisi Lingkungan
Deskripsi: Perubahan tekanan udara sering kali merupakan indikator perubahan cuaca.
Manfaat: Dengan memantau tekanan udara, Anda dapat memprediksi perubahan cuaca yang akan datang dan mengambil tindakan pencegahan untuk melindungi tanaman.
2. Pengawasan Ventilasi
Deskripsi: Tekanan udara yang tidak normal dapat menunjukkan masalah dengan ventilasi rumah kaca.
Manfaat: Dengan memantau tekanan udara, Anda dapat memastikan bahwa ventilasi berfungsi dengan baik, menghindari kondisi yang bisa merugikan tanaman.
Kondisi normal 2.34 pascal, di bawah ini berarti kondisi tidak normal.
4. Flowchart dan Listing Program [Kembali]
Flowchart




master slave
Komentar
Posting Komentar